



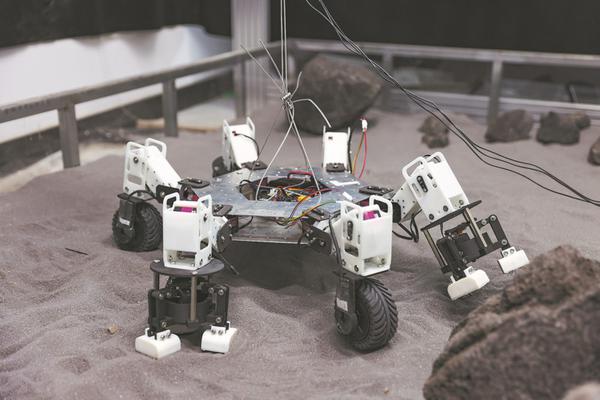
A robot works in a simulated environment for space mining at a lab of China University of Mining and Technology in Xuzhou, Jiangsu province. (Provided to China Daily)
The prospect of space mining — extracting minerals from the moon, Mars and other extraterrestrial bodies — has long captured the imagination and fed science fiction circles. Now, researchers at a university in Jiangsu province have begun to check whether it could become a reality.
A group of researchers at China University of Mining and Technology in Xuzhou, Jiangsu, headed by Professor Liu Xinhua from the university's School of Mechanical and Electrical Engineering, have been working on a six-legged crawling robot since 2024. The researchers have tested its performance at a special lab that can simulate the sandy terrain of near-Earth asteroids and has a suspension system to replicate microgravity conditions.
Hua Dezheng, an associate professor on the research team, told China Daily on Tuesday that the spiderlike robot measures about 40 centimeters in diameter and weighs nearly 30 kilograms. It is electrically powered using a power cord.
"It will not be doing actual mining. Instead, it is used to verify technologies that can help to materialize extraterrestrial mining," he said, adding that the robot is part of a broader project undertaken by his university to explore the possibility of space mining.
"Our robot is specifically tasked with demonstrating roaming and digging technologies. Researchers from other departments are working on other systems in this project, such as prospecting and transportation instruments," Hua said.
If such a robot is to be used in actual mining operations on an extraterrestrial body in the future, it will likely be equipped with additional mission payloads such as a robotic arm, sensors and cameras, and will rely on solar power, he added.
"The project's technology demonstration phase is scheduled to conclude in 2026, and the university will review the results of all of the participants' work to determine what the next steps will be," he said.
According to China University of Mining and Technology, the robot's body is made of three advanced alloys: aluminum-based silicon carbide composites, titanium alloys and nickel-titanium shape memory alloys. These materials combine exceptional strength, flexibility and stability with shape-recovery properties that improve durability under extreme stress. The robot body has adjustable drilling modules that enhance environmental adaptability and operational efficiency.
The robot, which features three wheeled legs and three claw-tipped legs, is able to handle various challenges in extraterrestrial environments. Lunar gravity is only one-sixth of Earth's, and asteroids often exhibit ultralow gravity, posing significant challenges for drilling into their surfaces.
"The robot's claw system is an array-type structure that enhances adhesion and gripping ability in microgravity environments," Liu was quoted by China Central Television as saying. "It allows the robot to stay anchored while collecting samples and move efficiently based on the terrain."
Globally, the issue of space resources has been a hot topic among scientists for many years. Researchers have identified abundant mineral deposits on celestial bodies including the moon, Mars and near-Earth asteroids, and have floated the idea of extracting helium-3, an isotope present on the lunar surface, for nuclear fusion — a cleaner method of producing nuclear energy.
According to Chinese researchers, just 20 tons of helium-3 could help meet all of China's power demands for a year.







































 京公網(wǎng)安備 11010202009201號
京公網(wǎng)安備 11010202009201號